Research activities
Quick links to the most accessed pages: [Rectification][J-linkage][Multi View Matching][Samantha]
3D Modeling
Main theme: model acquisition from images, structure from motion
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
Global camera-network orientation | ||
 |
Procrustean methods | ||
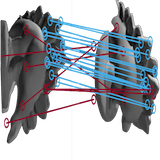 |
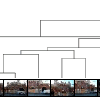
Multi View Matching | ||
 |
Bundle adjustment with constraints |
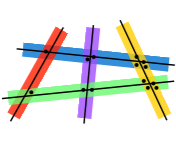
Multiple-model fitting
Fitting multiple instances of a model to data corrupted by noise and outliers
 |
Linkage clustering with Jaccard/Tanimoto |
|
 |
||
 |
||
 |
||
 |
Remote Sensing
LIDAR processing
 |
Full-Waveform LIDAR Data Classification |
Mosaicing - View Synthesis
Methods based on image collineations for mosaicing, background/foreground segmentation, image synthesis.
 |
||
 |
||
 |
||
 |
||
 |
Augmented reality
Augmenting underwater images, model tracking, cross-modality.
 |
||
 |
||
 |
Augmented Reality for Remotely Operated Vehicles | |
 |
||