Dynamic Stereo with Spatial Support
DIEGM
University of Udine, Udine - Italy
Description
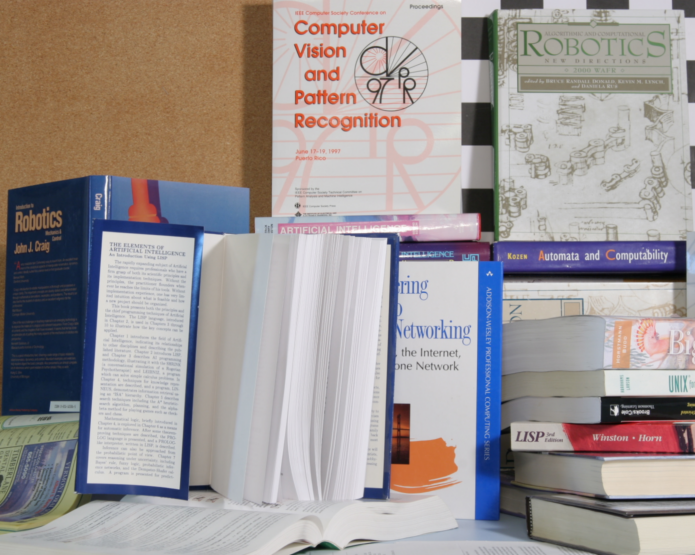
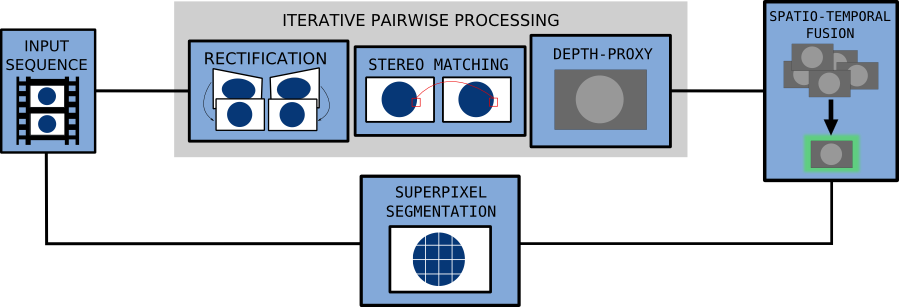
Given a monocular video sequence, a depth map for a reference frame is produced.
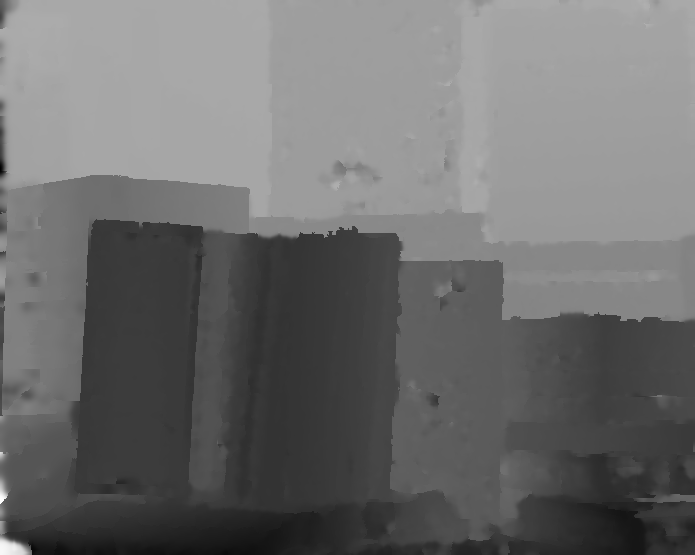
The result is yielded by a Kalman filter based method that processes frames pairwise producing several depth measure that are then merged into a final estimate, taking spatial support into account in each frame.
Algorithm
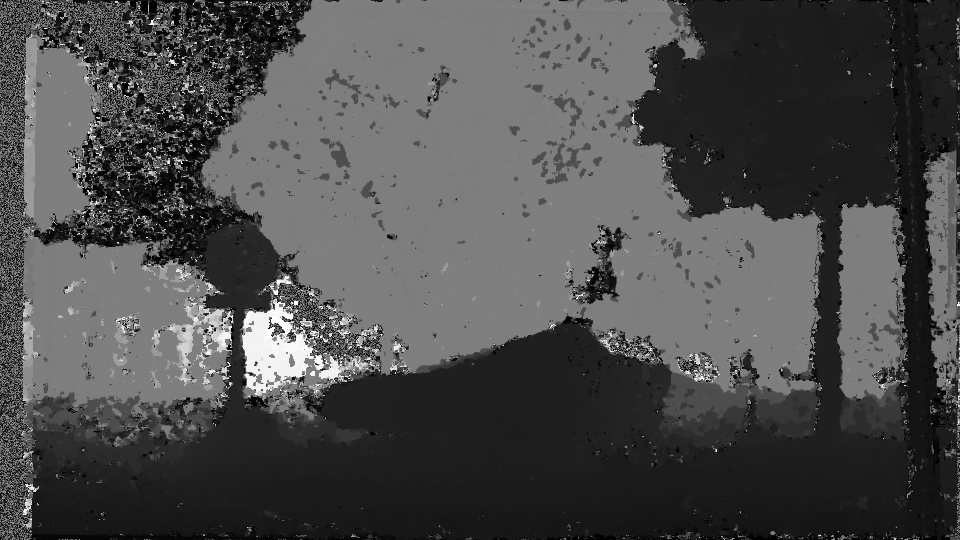
- the reference frame is segmented into superpixels (nearly uniform regions);
- each pairwise processing produces a depth measure;
- all the depth measures are merged into the final depth estimate using the Kalman filter with spatial support.
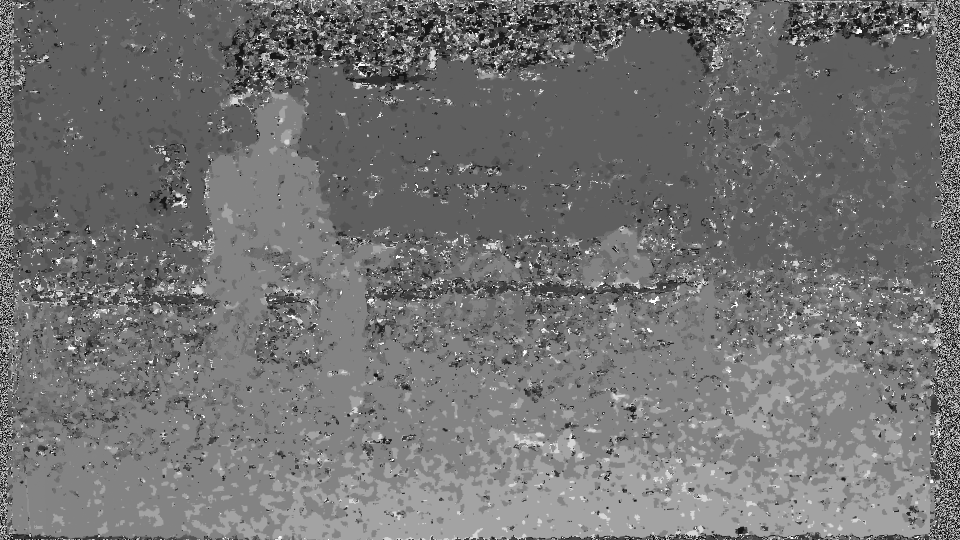
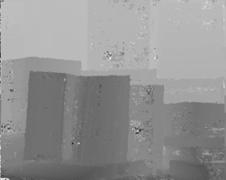
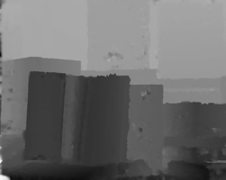
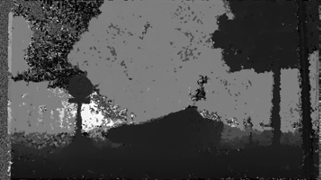
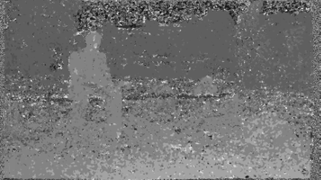
Integration results
| Reference views |
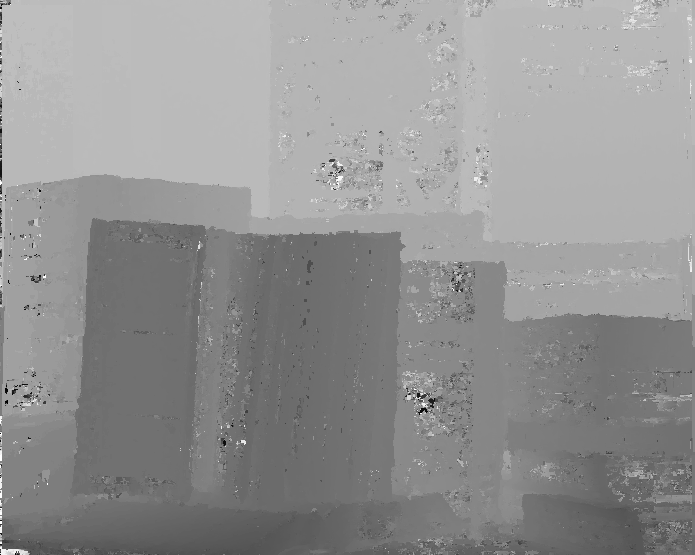
Kalman-T
(temporal-only) |
Kalman-ST
(spatial support) |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
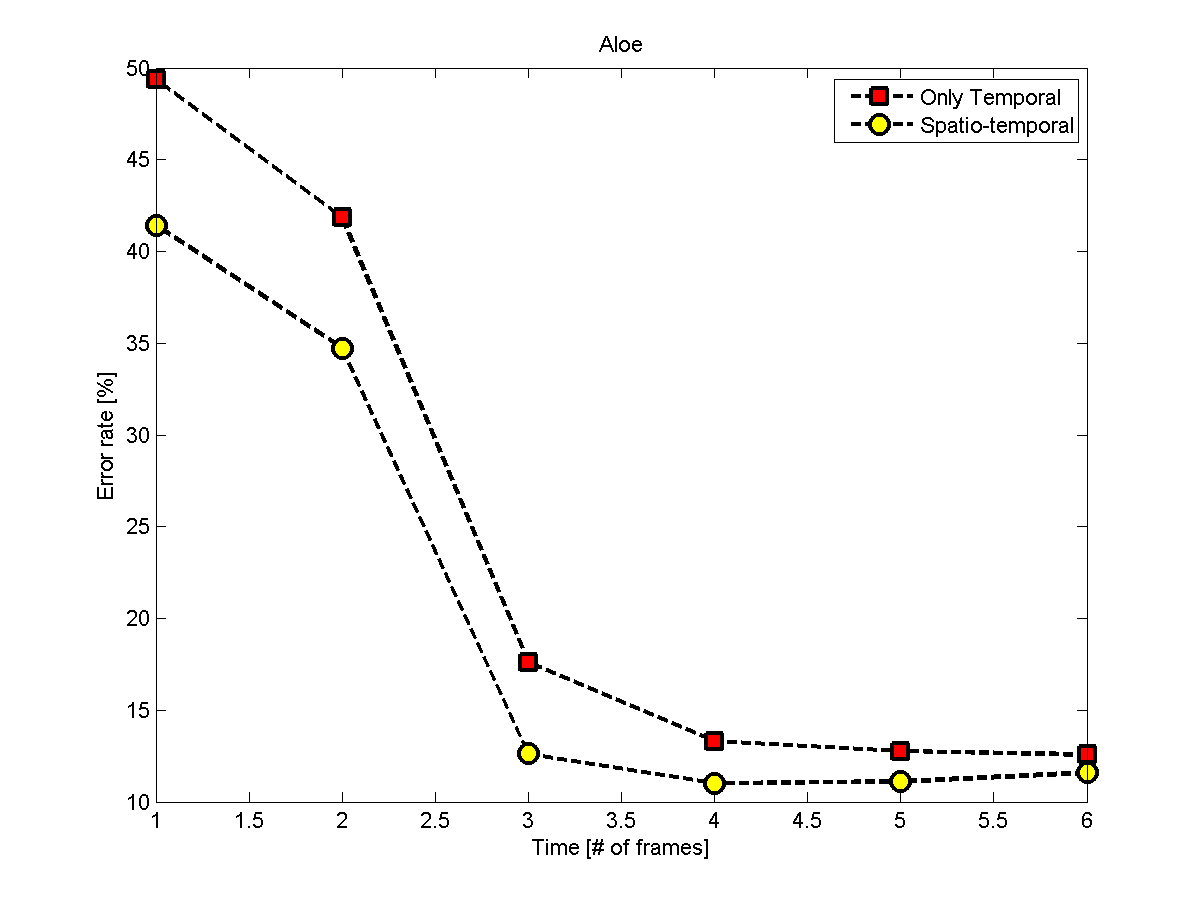
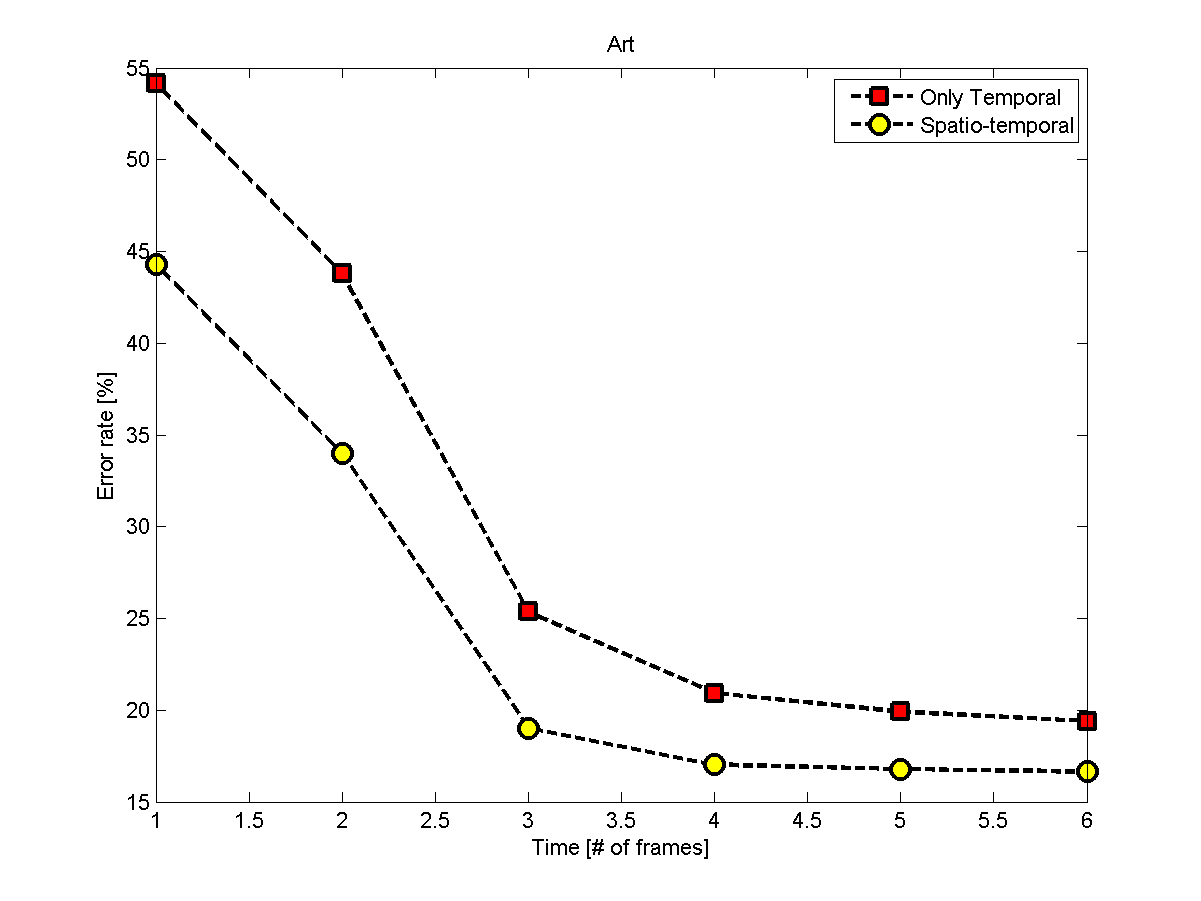
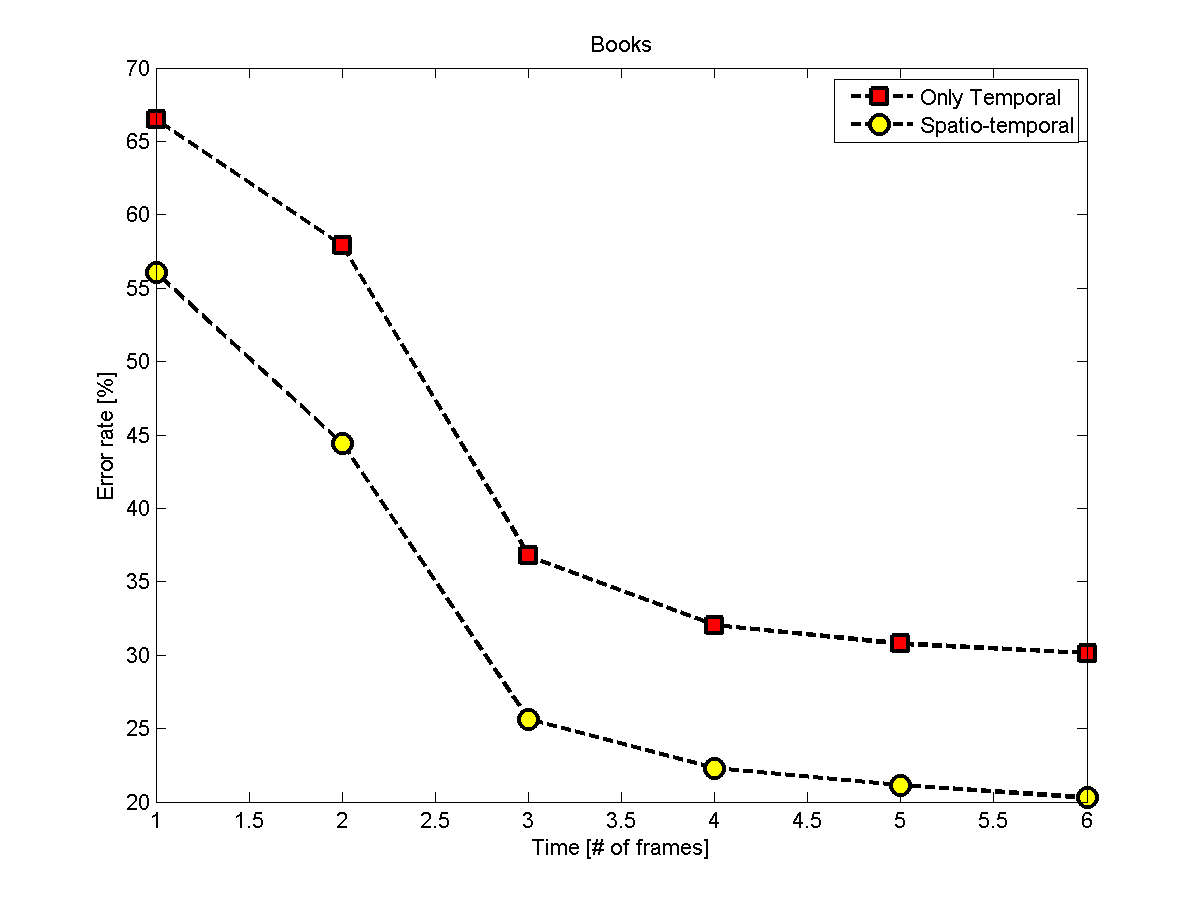
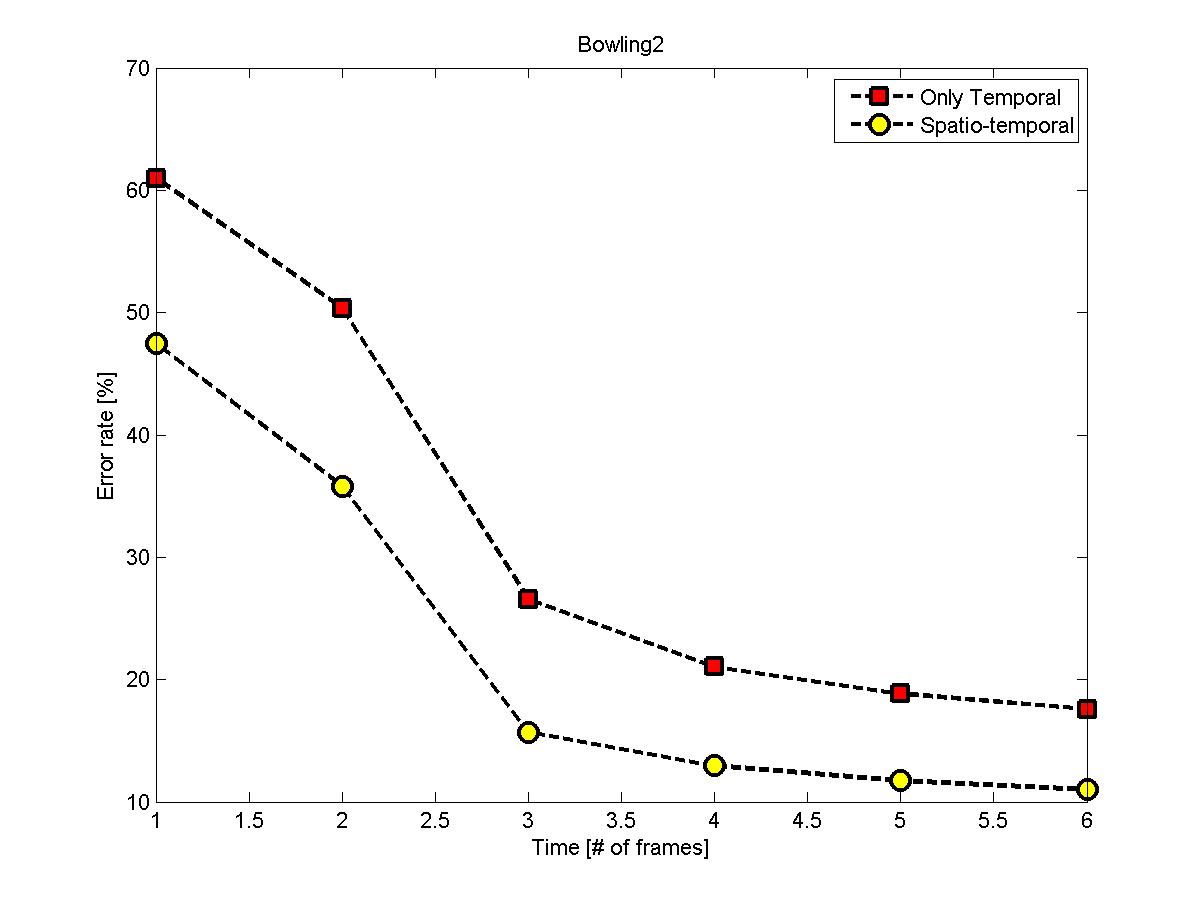
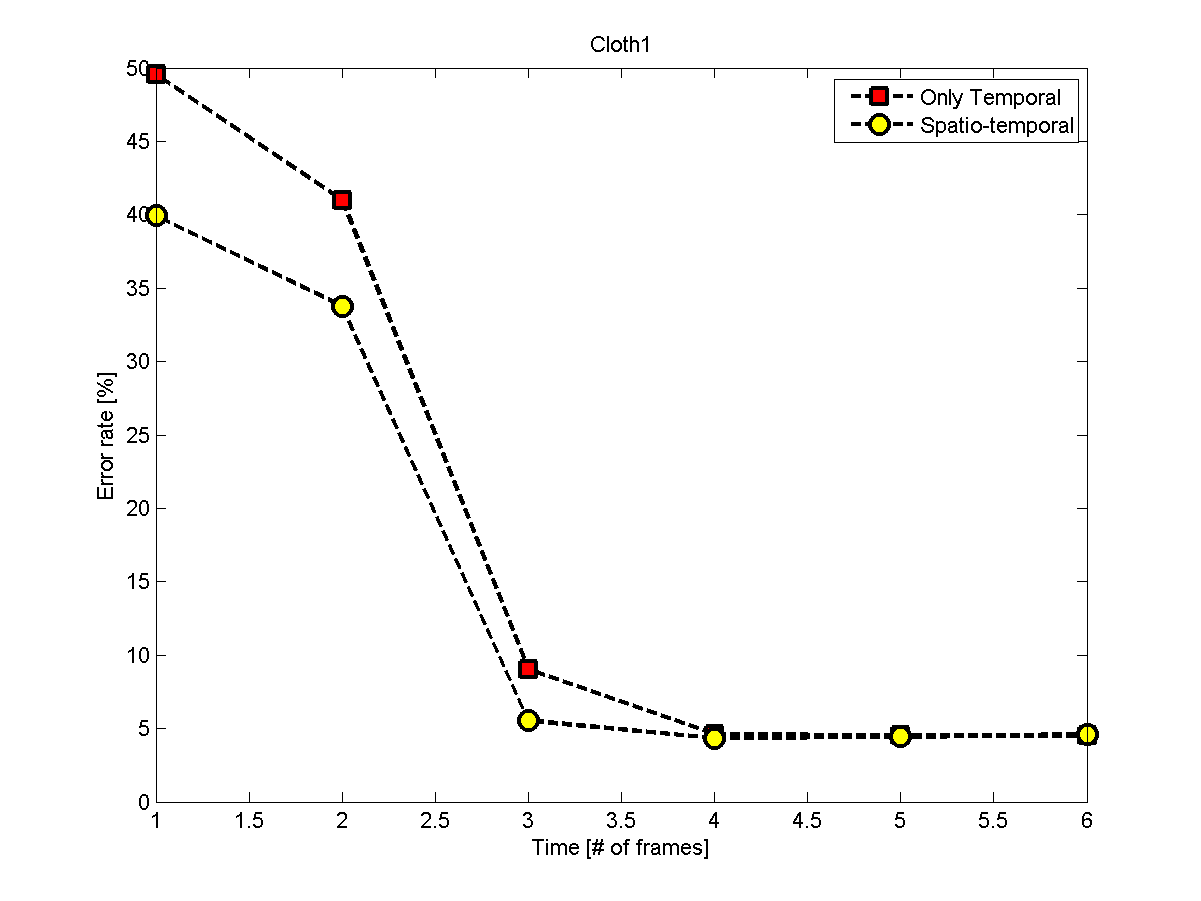
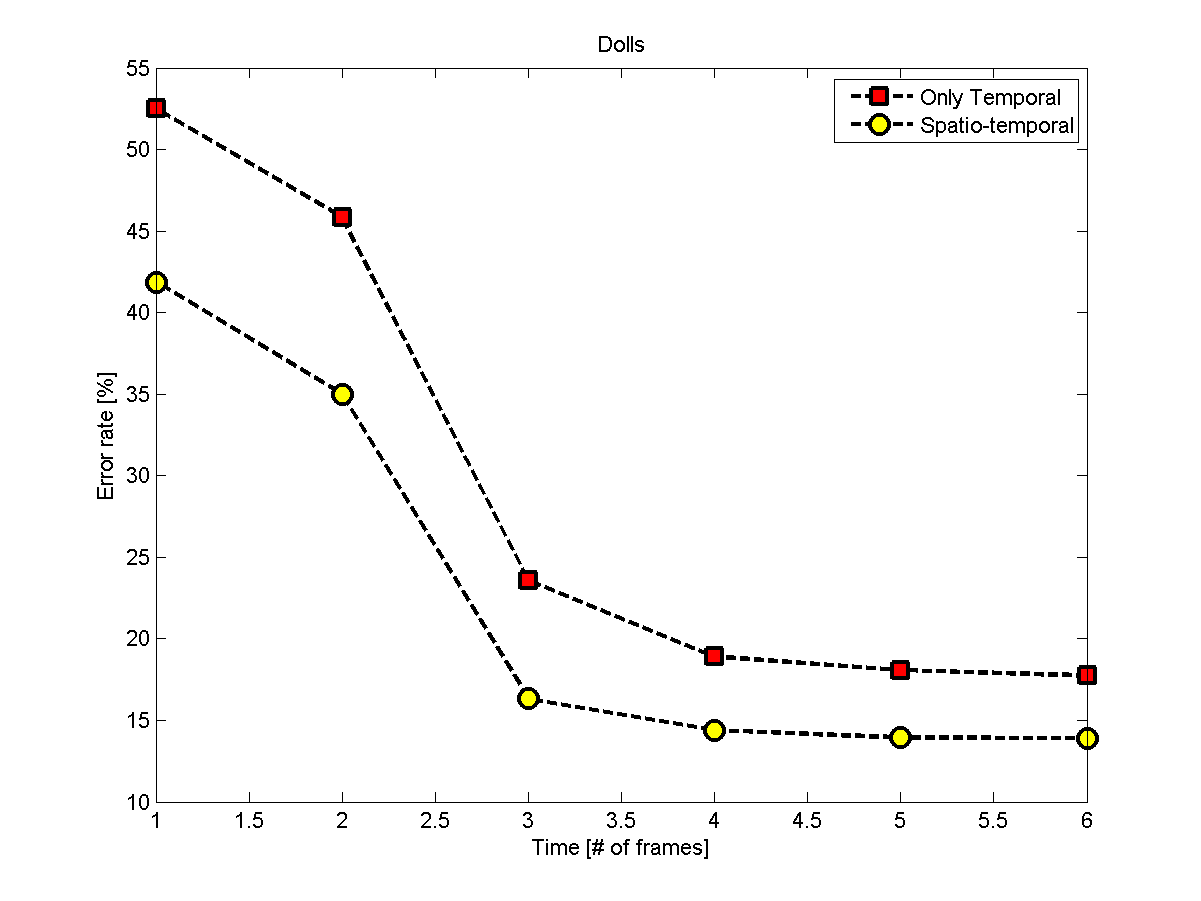
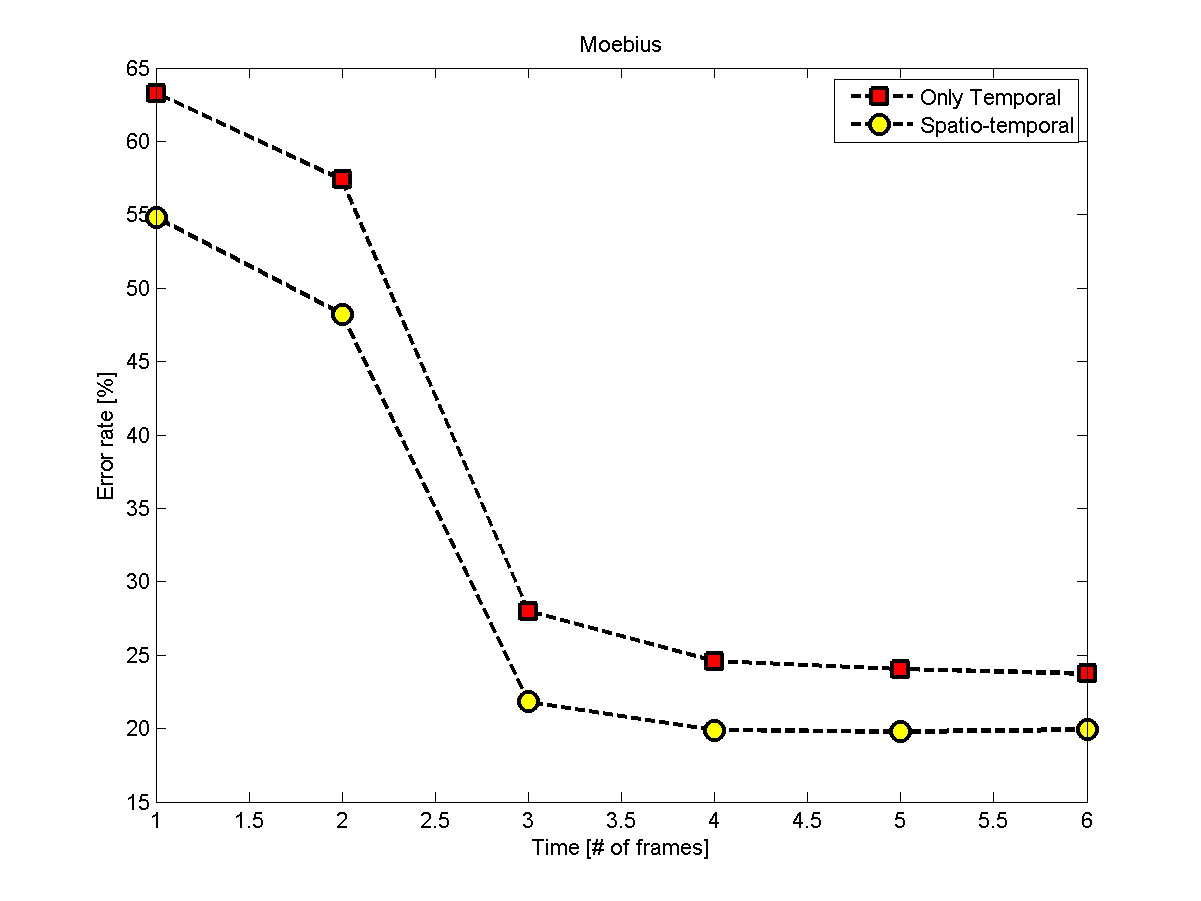
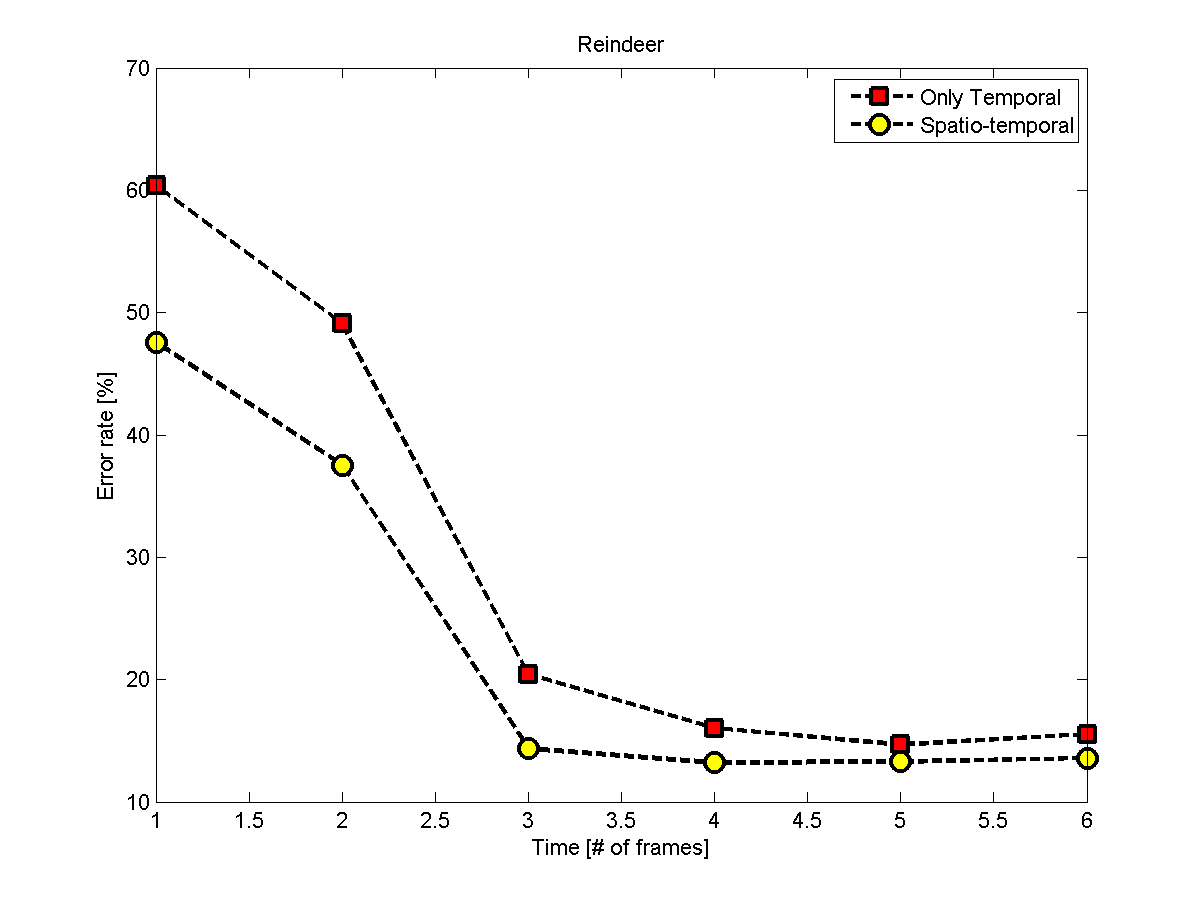
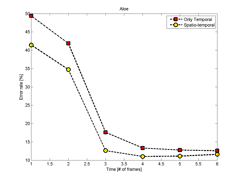
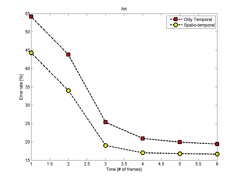
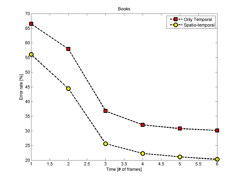
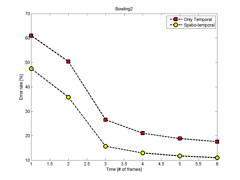
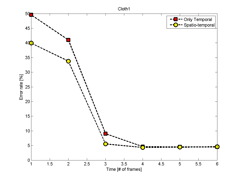
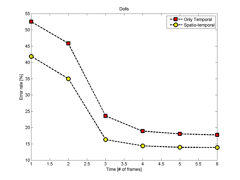
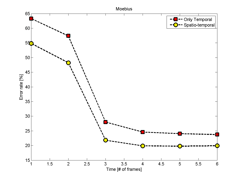
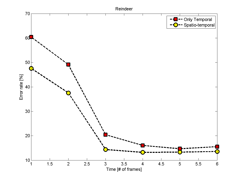
Decreasing error rate
| Error rate decreasing as more measures are integrated |
 |
 |
 |
 |
 |
 |
 |
 |
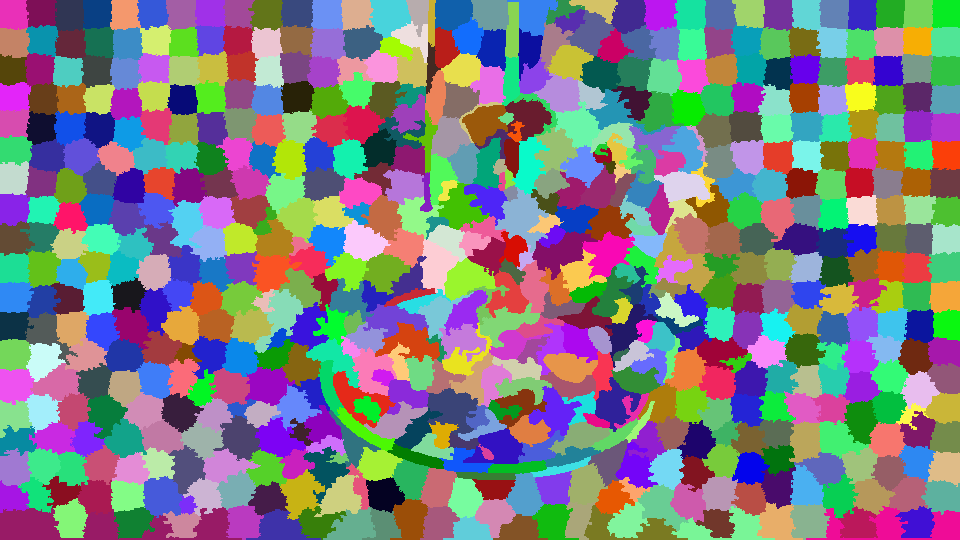
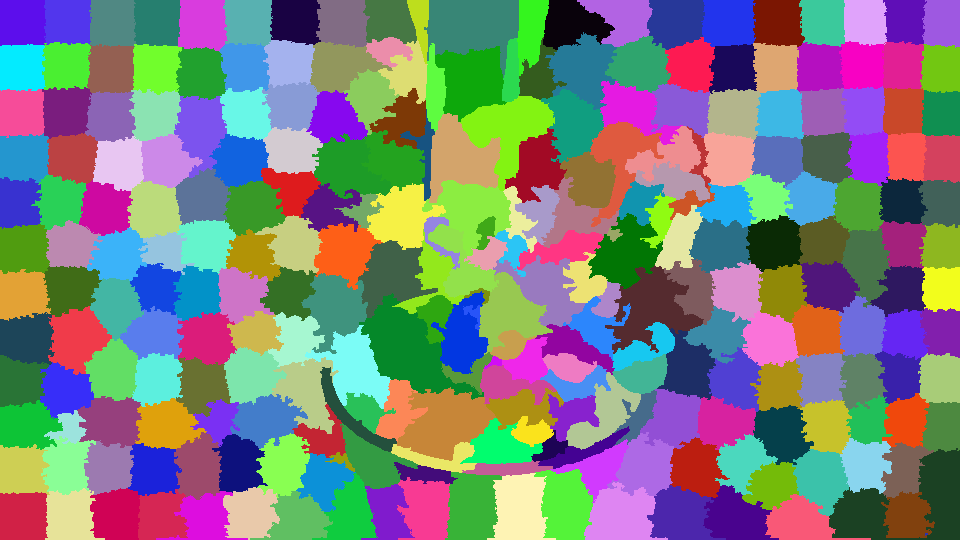
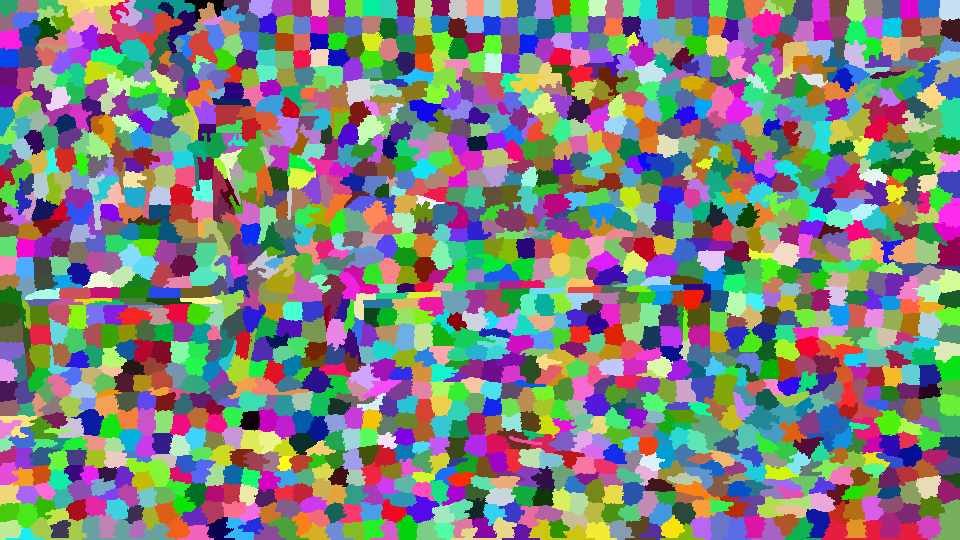
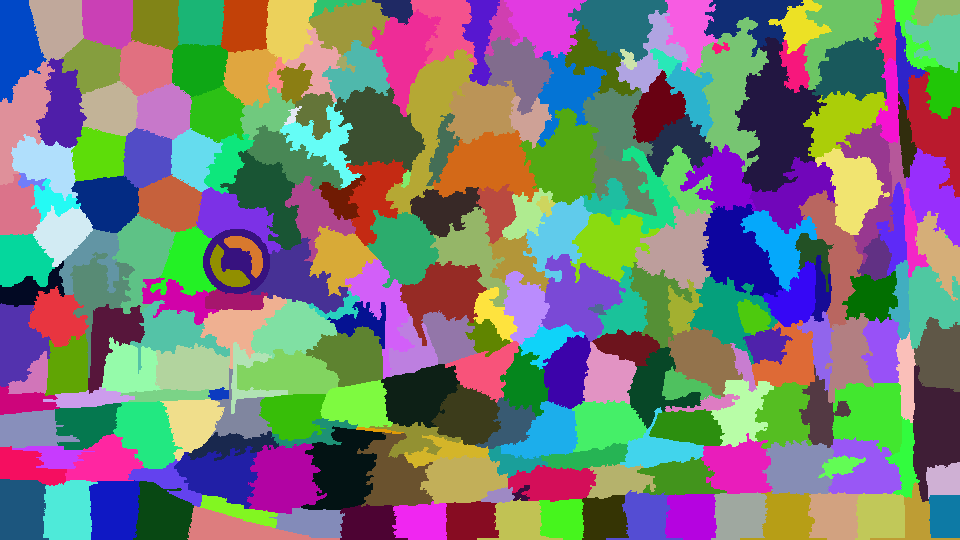
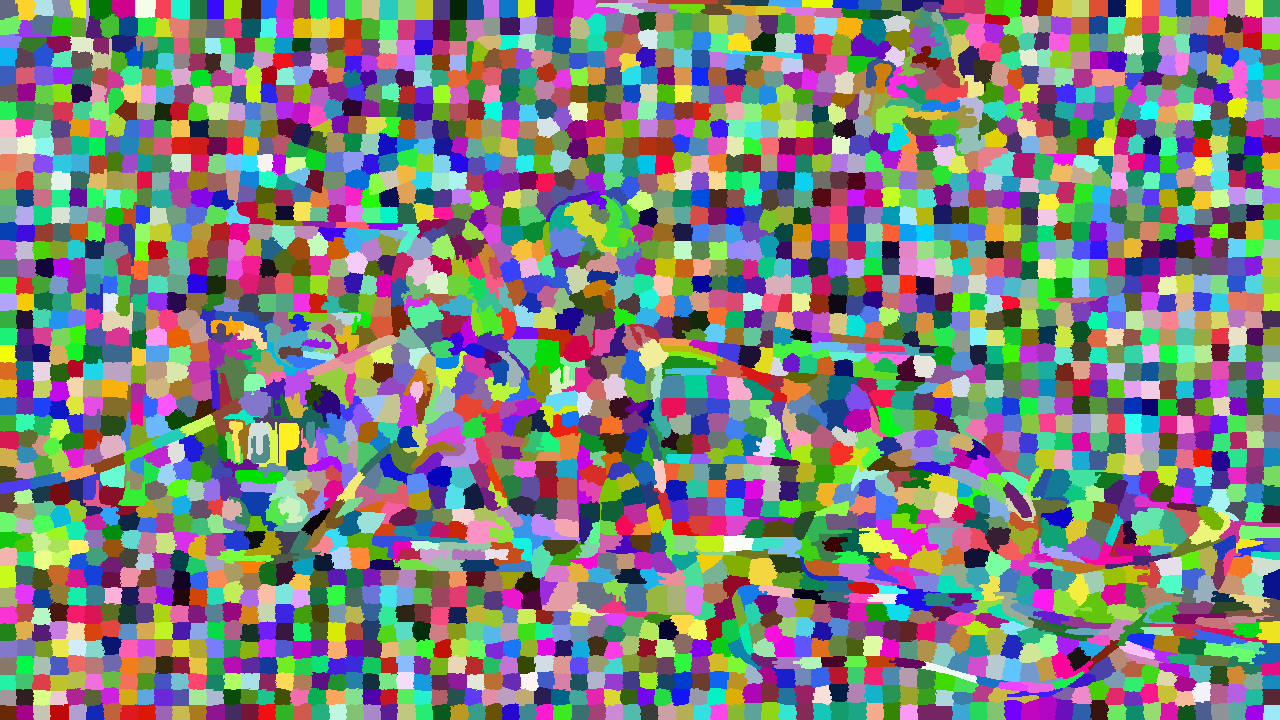
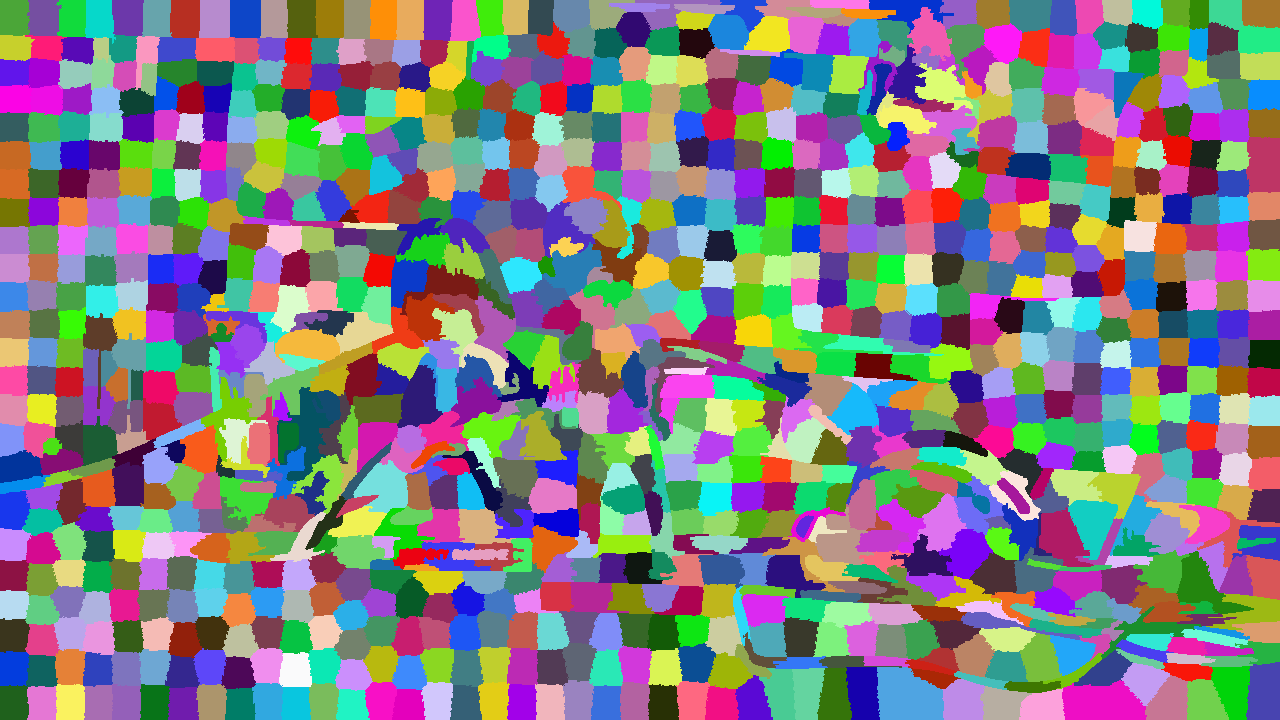
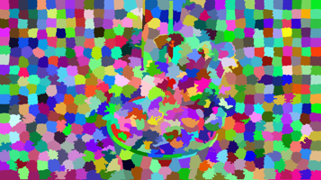
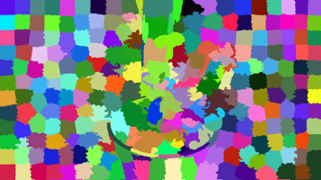
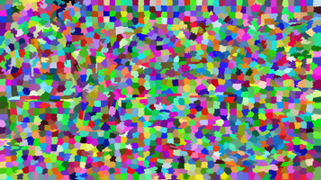
Examples of superpixels extraction
| Reference views |
Superpixelsize=300 |
Superpixelsize=800 |
Superpixelsize=2000 |
| |
 |
 |
 |
| |
 |
 |
 |
| |
 |
 |
 |
| |
 |
 |
 |
Reference papers
- Malapelle, F.; Fusiello, A.; Rossi, B. and Fragneto, P. A data-fusion
approach to motion-stereo. In Signal Processing: Image Communication, 43:
42-53, 2016. [pdf]
- F. Malapelle, A. Fusiello, B. Rossi, E. Piccinelli and P. Fragneto. Uncalibrated Dynamic Stereo Using Parallax. In Proceedings of the 8th International Symposium on Image and Signal Processing and Analysis (ISPA), Trieste, Italy, 2013. IEEE. (PDF)